Ответ на пост «"Пятачок неси ....ружьё????" - или из чего же всё таки стрелял Пятачок ....часть 2»
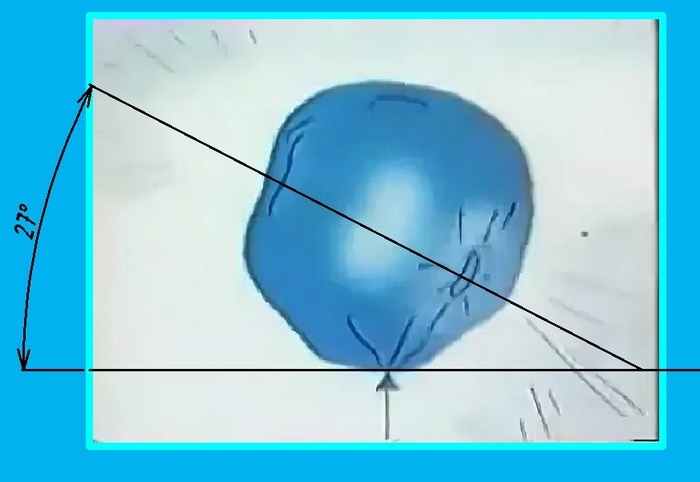
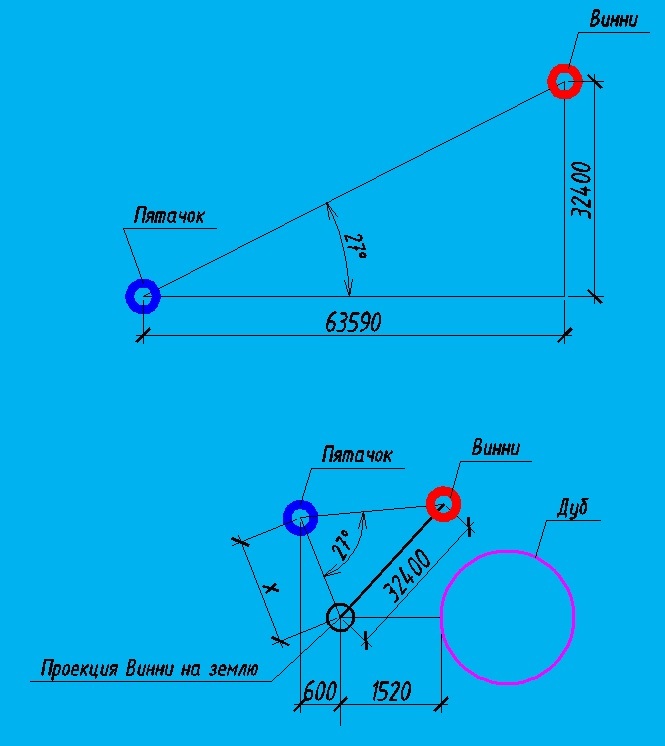
Всё предельно просто. Угол в 27 градусов в диспозиции Винни де Пуха и п`Яточка объясняется тем, что последний использовал экспериментальный, не пошедший в серию, переносной одинарный вариант зенитной пусковой установки RIM-2 Terrier.
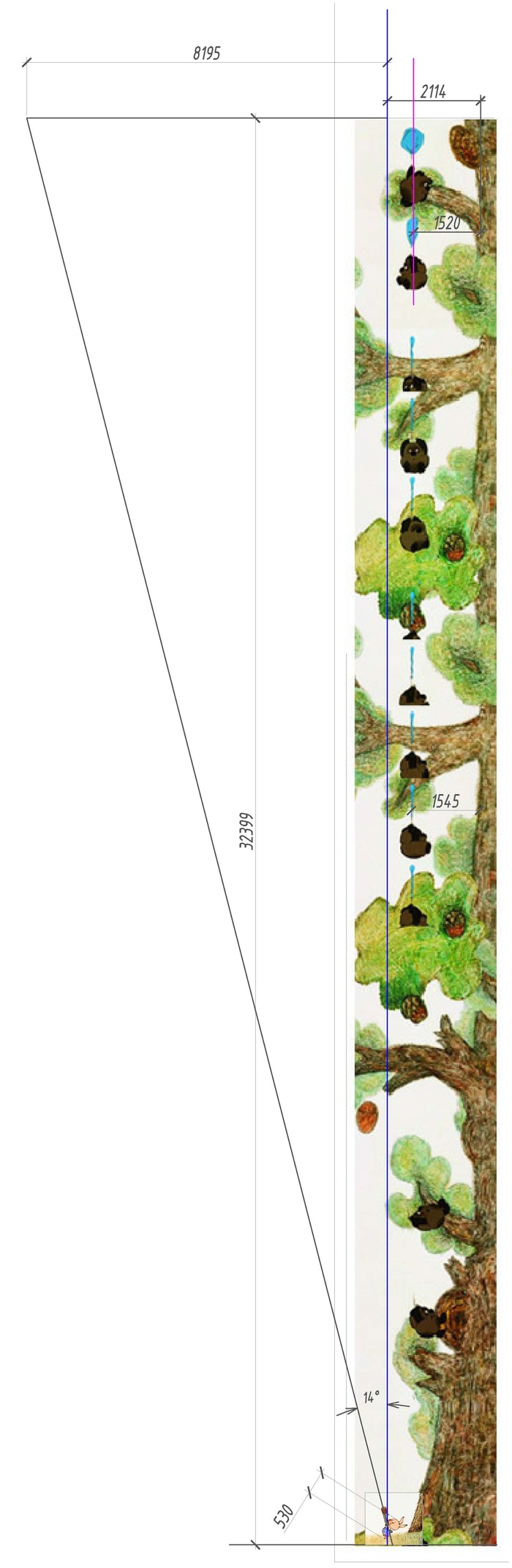
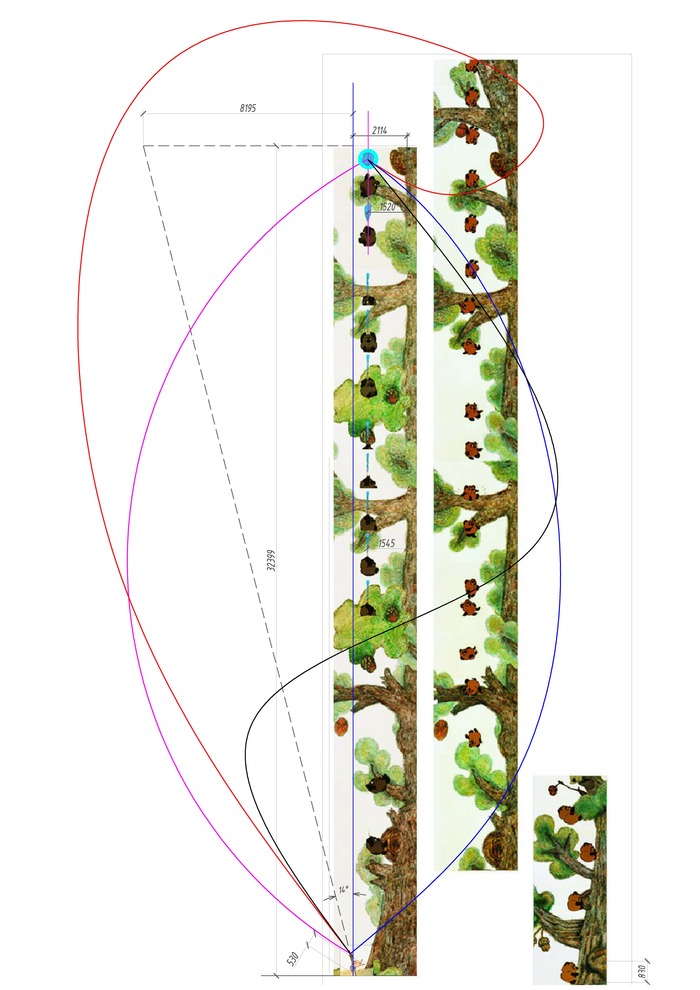
Чёрная линия на вашей схеме.
За давностью лет (всё-таки 50-60-ые прошлого века, память уже подводит) пояснение возлагаю на современные средства анализа и синтеза информации. Дополнительно можно предположить, что, как вариант, использовалась кустарная наземная пусковая установка для пуска первой серийной советской ракеты "воздух-воздух" К-5, как сейчас используются ПУ для НУРСов, установленных на джипах, мотолыгах и прочих средствах передвижения.
Когда-то слышал историю, как летали первые ракеты воздух-воздух.
Лётчик держал цель в прицеле, а ракета двигалась волнообразно вверх-вниз, пересекая некий "луч наведения", т.е. пересекла - значит на верном пути, меняет траекторию на обратную, опять пересекла, опять меняет траекторию, грубо говоря синусоида, пока не долетит до цели. Так ли это?
Да, ваша история в целом верна и описывает принцип работы **наведения по лучу** (beam riding guidance), который использовался в одних из первых управляемых ракетах **воздух-воздух**.
### Как это работало
Пилот (или радар самолёта-носителя) захватывал цель и удерживал на ней узкий радиолуч (radar beam) от бортовой РЛС. Ракета запускалась в направлении цели и имела датчики на хвосте, которые "смотрели" назад на этот луч.
Ракета определяла своё положение относительно центра луча (по интенсивности сигнала или модуляции). Если она отклонялась в сторону, бортовая система управления генерировала команды на рули, чтобы вернуть ракету в центр.
Из-за инерции, задержек в системе и особенностей управления ракета не летела строго по прямой оси луча, а **колебалась вокруг неё** — вверх-вниз и в стороны, пересекая луч многократно. Это действительно напоминало **синусоиду** или волнообразную траекторию (oscillatory path). Такие колебания были нормой для ранних систем, особенно с коническим сканированием луча.
### Примеры ракет
Классический пример — советская **К-5** (RS-2U, NATO: AA-1 Alkali) 1950-х годов, первая серийная ракета воздух-воздух в СССР. Она использовалась на МиГ-17, МиГ-19 и МиГ-21 и работала именно по принципу beam riding. Пилот должен был удерживать цель в прицеле всё время полёта ракеты, а она "осёдлывала" луч, колеблясь вокруг него.
Аналогично работали некоторые ранние западные системы, хотя для воздух-воздух beam riding применялся реже (чаще для зенитных ракет, как ранние версии RIM-2 Terrier).
### Почему так летала ракета
Это было связано с простотой системы (одна из первых), но и с недостатками: точность падала на больших дистанциях из-за расширения луча, а колебания увеличивали расход энергии и снижали манёвренность. Позже такие ракеты заменили на полуактивное радиолокационное наведение (SARH, как AIM-7 Sparrow) или инфракрасное.
Ваше описание очень точное для тех времён — многие ветераны и источники именно так и вспоминают полёт этих ракет: зигзагообразный или синусоидальный вокруг невидимого "луча".
https://ru.wikipedia.org/wiki/К-5_(ракета)
https://en.wikipedia.org/wiki/RIM-2_Terrier
https://en.wikipedia.org/wiki/Beam_riding
Beam Riding: Наведение по лучу, также известное как наведение по лучу вдоль линии визирования (LOSBR), наведение по лучу или наведение по радиолокационному лучу, — это метод наведения ракеты на цель с помощью радиолокационного или лазерного луча. Название относится к тому, как ракета летит по направляющему лучу, который нацелен на цель. Это одна из простейших систем наведения, широко использовавшаяся в ранних ракетных системах, однако она имела ряд недостатков для наведения на большие расстояния и в настоящее время обычно применяется только на малых дистанциях.